Пусть катушка с током ![]() расположена на поверхности гладкого цилиндрического ротора электрической машины (рис.1.38).
расположена на поверхности гладкого цилиндрического ротора электрической машины (рис.1.38).
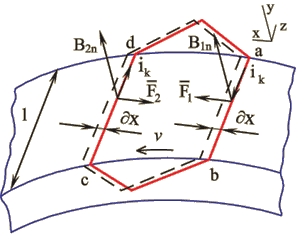
Рис.1.38
Кроме этой цепи тока могут существовать и другие, как на этой вращающейся части, так и на другой – неподвижной. Пусть всего цепей ![]() , и в одной из этих цепей, в
, и в одной из этих цепей, в ![]() -й, ток равен
-й, ток равен ![]() . Уравнение работы, совершаемой источниками, может быть записано в виде
. Уравнение работы, совершаемой источниками, может быть записано в виде
 , (1.79)
, (1.79)
где ![]() и
и ![]() - соответственно потокосцепления с рассматриваемой катушкой и с
- соответственно потокосцепления с рассматриваемой катушкой и с ![]() ‑й из остальных
‑й из остальных ![]() . Изменение потокосцеплений катушек может быть обусловлено как изменениями токов в отдельных или во всех катушках, так и изменениями положений катушек. Различая эти изменения, напишем, что
. Изменение потокосцеплений катушек может быть обусловлено как изменениями токов в отдельных или во всех катушках, так и изменениями положений катушек. Различая эти изменения, напишем, что
![]() ,
, ![]() , (1.80)
, (1.80)
![]() и
и ![]() - изменения потокосцепления
- изменения потокосцепления ![]() -й катушки при изменении тока (
-й катушки при изменении тока (![]() ) и положения (координаты
) и положения (координаты ![]() ). Вообще,
). Вообще, ![]() и
и ![]() - изменения переменных системы при изменении тока
- изменения переменных системы при изменении тока ![]() и координаты
и координаты ![]() .
.
Если все катушки неподвижны, то механическая работа равна нулю, и по уравнению (1.79)
 . (1.81)
. (1.81)
Учитывая уравнение (1.80), из уравнений (1.79) и (1.81) получаем:
 . (1.82)
. (1.82)
Механическая работа по уравнению (1.82) будет найдена при определении изменения магнитной энергии, вызываемого изменением взаимного расположения катушек при постоянных токах в них.
Пусть характеристики намагничивания системы линейны. Тогда полная энергия ![]() , запасенная в поле системы катушек, определится суммой вкладов каждой из них:
, запасенная в поле системы катушек, определится суммой вкладов каждой из них:
 (1.83)
(1.83)
и, принимая во внимание (1.82),
 . (1.84)
. (1.84)
Обозначим: ![]() - потокосцепление
- потокосцепление ![]() -й катушки, возбуждаемое только этой
-й катушки, возбуждаемое только этой ![]() -й катушкой;
-й катушкой; ![]() - потокосцепление
- потокосцепление ![]() -й катушки, возбуждаемое только другой
-й катушки, возбуждаемое только другой ![]() -й катушкой с током;
-й катушкой с током; ![]() - потокосцепление
- потокосцепление ![]() -й катушки, возбуждаемое рассматриваемой
-й катушки, возбуждаемое рассматриваемой ![]() -й катушкой. Выполним очень малое перемещение
-й катушкой. Выполним очень малое перемещение ![]() этой
этой ![]() -й катушки относительно других катушек (1.38), считая их неподвижными. Тогда слагаемые в правой части уравнения (1.84):
-й катушки относительно других катушек (1.38), считая их неподвижными. Тогда слагаемые в правой части уравнения (1.84):
 , (1.85)
, (1.85)
 . (1.86)
. (1.86)
Для линейной системы ![]() ,
, ![]() , и
, и ![]() . Поэтому уравнение (1.86) можно представить в следующем виде:
. Поэтому уравнение (1.86) можно представить в следующем виде:
 . (1.87)
. (1.87)
В соответствии с уравнениями(1.84)-(1.87):
![]() , (1.88)
, (1.88)
где  - потокосцепление
- потокосцепление ![]() -й катушки, возбуждаемое всеми остальными
-й катушки, возбуждаемое всеми остальными ![]() катушками. Второе слагаемое в правой части уравнения (1.88) мало, а для электрической машины, имеющей постоянный зазор
катушками. Второе слагаемое в правой части уравнения (1.88) мало, а для электрической машины, имеющей постоянный зазор ![]() , оно равно нулю. Электромагнитная сила, действующая на катушку, в этом случае
, оно равно нулю. Электромагнитная сила, действующая на катушку, в этом случае
 . (1.89)
. (1.89)
Далее предполагается, что катушка состоит из ![]() витков, ее стороны имеют бесконечно малую ширину и совпадают с образующими цилиндрической поверхности, и нормальная составляющая индукции
витков, ее стороны имеют бесконечно малую ширину и совпадают с образующими цилиндрической поверхности, и нормальная составляющая индукции ![]() на поверхности ротора не изменяется на его длине l (рис.1.38). Тогда, по определению потокосцепления,
на поверхности ротора не изменяется на его длине l (рис.1.38). Тогда, по определению потокосцепления,
![]() , (1.90)
, (1.90)
где ![]() и
и ![]() - нормальные составляющие индукции, возбуждаемой всеми остальными катушками (токами) в точках окружности, через которые проходят средние линии сторон рассматриваемой
- нормальные составляющие индукции, возбуждаемой всеми остальными катушками (токами) в точках окружности, через которые проходят средние линии сторон рассматриваемой ![]() -й катушки.
-й катушки.
Электромагнитная сила, действующая на катушку, по (1.90) и (1.89):
![]() . (1.91)
. (1.91)
Определенная уравнением (1.89) сила ![]() положительна – действует в направлении перемещения
положительна – действует в направлении перемещения ![]() , если знак изменения потока поля, вызванного током
, если знак изменения потока поля, вызванного током ![]() , совпадает со знаком изменения потока, вызванного перемещением на
, совпадает со знаком изменения потока, вызванного перемещением на ![]() .
.
Для быстрого определения направления силы три пальца левой руки расположим так, чтобы указательный, средний и большой пальцы образовали систему координат: указательный палец совпадает с направлением вектора индукции магнитного поля, средний – с направлением тока, большой палец указывает направление силы (рис.1.38).